नमस्कार दोस्तों , मेरा नाम विकास उर्फ अमल कुमार है। और मैंने AKTU लखनऊ से Mechanical Engineering 2021 में शुरू की और 2025 में डिग्री मिली। चार साल में जो सबसे ज़्यादा सीखा, वो labs में नहीं बल्कि हॉस्टल की छत पर बैठकर jugaad projects करते वक़्त सीखा। मुझे हमेशा से machines और robots में दिलचस्पी थी — पर final year तक यह interest सिर्फ YouTube देखने तक ही सिमटा था।
जब खुद हाथ से robot car बनाई, तब समझ आया कि यार, यह तो मुझसे भी होता है। जो आज मैं बताने जा रहा हूँ, काश यह मुझे engineering के पहले साल में पता होता।
मेरे पास यह आइडिया कहाँ से आया?
दोस्तों , जब मैं तीसरे साल में था तब मुझे एक सीनियर भाई ने Arduino वाली car दिखाई थी — Bluetooth से चल रही थी, खुद रास्ता बदल रही थी, और बस ₹700-800 में बनी थी। उस दिन से सोचता रहा कि यह तो मुझसे भी बन जाएगी। छह महीने सोचता रहा, कुछ नहीं किया।
Final year में project का टाइम आया तो लगा — अब नहीं तो कब। और जिस दिन पहली बार robot car ने खुद obstacle देखकर रास्ता बदला, वो feeling अलग ही थी।
अगर आप भी beginner हो — Mechanical हो, CSE हो या कोई भी — यह guide आपके लिए ही है।
Robot Car होती क्या है?
भाई आसान भाषा में — एक छोटी सी गाड़ी जिसमें:
- Motors होती हैं — चलाने के लिए
- Arduino होता है — यही car का दिमाग है
- Sensors होते हैं — रास्ते में रुकावट पहचानने के लिए
- Battery होती है — पूरे सिस्टम को power देने के लिए
Arduino एक microcontroller board है। इसमें आप code डालते हो और वो उसी हिसाब से काम करता है — बिल्कुल एक छोटे कंप्यूटर की तरह।
इसे बनाने के लिए क्या-क्या Component चाहिए?
| सामान | कीमत (लगभग) |
|---|---|
| Arduino Uno R3 (clone चलेगा) | ₹250–300 |
| L298N Motor Driver Module | ₹80–120 |
| 4WD Robot Chassis Kit | ₹200–350 |
| HC-SR04 Ultrasonic Sensor | ₹40–60 |
| HC-05 Bluetooth Module | ₹150–200 |
| 18650 Batteries (2 पीस) + Holder | ₹180–250 |
| Jumper Wires का सेट | ₹50 |
कुल: ₹950 – ₹1300 के बीच हो जाएगा।
एक बात बताता हूँ — मैं पहले original Arduino खरीदने गया था, ₹900 वाला। दोस्त ने रोका, बोला “clone ले यार, beginner level पे कोई फर्क नहीं पड़ता।” सच में नहीं पड़ता।
Chassis Assembly — गाड़ी का ढाँचा
Kit के अंदर एक acrylic plate होती है, 4 DC motors, 4 wheels, nuts-bolts और wires। साथ में instruction sheet भी होती है जो ज़्यादातर Chinese में होती है — उसमें कुछ समझ नहीं आता।
बस इतना करो:
- Acrylic plate के चारों कोनों पर motors लगाओ। Screw ज़्यादा tight मत करो — plate crack हो जाती है, मेरी एक बार हुई थी।
- Motors पर wheels लगाओ।
- Battery holder को नीचे वाली plate पर fix करो।
- Arduino और L298N को ऊपर वाली plate पर double-sided tape से लगाओ।
30-40 मिनट में हो जाएगा।
Also read – वॉइस कंट्रोल्ड रोबोट कैसे बनाएं | Bluetooth और Android App से Arduino Robot Car Project
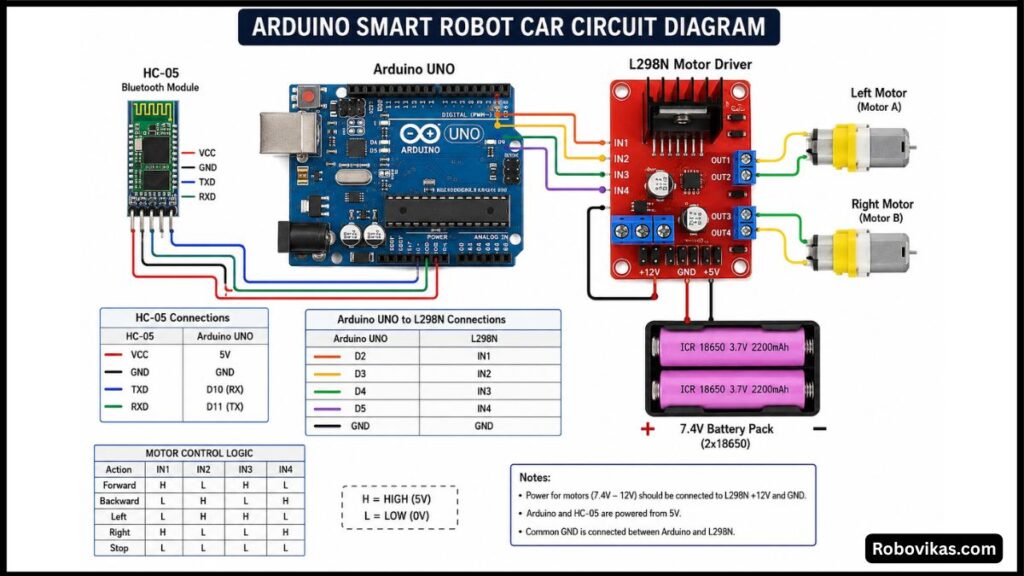
Wiring — यहाँ ध्यान देना ज़रूरी है
L298N एक motor driver है जो Arduino के छोटे signals को motors के लिए ज़रूरी power में बदलता है। Arduino खुद इतना current नहीं दे सकता कि motor चले।
Motors → L298N:
- Left side की दोनों motors → OUT1 और OUT2
- Right side की दोनों motors → OUT3 और OUT4
L298N → Arduino:
IN1 → Pin 2, IN2 → Pin 3
IN3 → Pin 4, IN4 → Pin 5
ENA → Pin 9, ENB → Pin 10
Ultrasonic Sensor → Arduino:
TRIG → Pin 11, ECHO → Pin 12
VCC → 5V, GND → GND
ज़रूरी बात: जब भी code upload करना हो, Bluetooth module पहले disconnect कर दो। वरना code upload नहीं होगा और आप एक घंटा error ढूंढते रहोगे। मैं यह बात कई बार भूला।
Code — Arduino का दिमाग
#define IN1 2
#define IN2 3
#define IN3 4
#define IN4 5
#define ENA 9
#define ENB 10
#define TRIG 11
#define ECHO 12
int spd = 180;
void setup() {
pinMode(IN1,OUTPUT); pinMode(IN2,OUTPUT);
pinMode(IN3,OUTPUT); pinMode(IN4,OUTPUT);
pinMode(ENA,OUTPUT); pinMode(ENB,OUTPUT);
pinMode(TRIG,OUTPUT); pinMode(ECHO,INPUT);
}
long doori() {
digitalWrite(TRIG,LOW); delayMicroseconds(2);
digitalWrite(TRIG,HIGH); delayMicroseconds(10);
digitalWrite(TRIG,LOW);
return pulseIn(ECHO,HIGH) * 0.034 / 2;
}
void aage() {
analogWrite(ENA,spd); analogWrite(ENB,spd);
digitalWrite(IN1,HIGH); digitalWrite(IN2,LOW);
digitalWrite(IN3,HIGH); digitalWrite(IN4,LOW);
}
void peeche() {
analogWrite(ENA,spd); analogWrite(ENB,spd);
digitalWrite(IN1,LOW); digitalWrite(IN2,HIGH);
digitalWrite(IN3,LOW); digitalWrite(IN4,HIGH);
}
void right() {
digitalWrite(IN1,HIGH); digitalWrite(IN2,LOW);
digitalWrite(IN3,LOW); digitalWrite(IN4,HIGH);
}
void ruko() {
digitalWrite(IN1,LOW); digitalWrite(IN2,LOW);
digitalWrite(IN3,LOW); digitalWrite(IN4,LOW);
}
void loop() {
if (doori() < 20) {
ruko(); delay(300);
peeche(); delay(500);
right(); delay(400);
} else {
aage();
}
}
Upload कैसे करें:
- arduino.cc से Arduino IDE download करो — बिल्कुल free है
- Arduino को USB से laptop से जोड़ो
- Tools → Board → Arduino Uno select करो
- Tools → Port → जो port दिखे वो select करो
- Upload बटन दबाओ
पहली बार error आएगी — घबराओ मत। ज़्यादातर मामलों में port select करना भूल जाते हैं।
वो गलतियाँ जो मैंने भी की थीं
Motor एक ही direction में घूम रही है? L298N के OUT wires उलटे लगे हैं — swap करो।
Car टेढ़ी चलती है, सीधी नहीं? दोनों side की motors की speed अलग है। ENA/ENB पर analogWrite value adjust करो।
Code upload नहीं हो रहा? Bluetooth module connected है — disconnect करो पहले।
Car चलती ही नहीं? Battery check करो। नई battery भी fully charged नहीं होती। 7.4V होना चाहिए।
भाई और आगे क्या क्या update कर सकते है।
एक बार यह काम करने लगे, तो इसमें और features जोड़ सकते हो:
- Line Following: नीचे IR sensors लगाओ — काली line पर चलेगी car
- Smartphone Control: HC-05 से Bluetooth app connect करो
- WiFi Control: ESP8266 module से internet पर control करो
मैंने line follower version भी बनाया था — college में presentation दी थी। Marks ज़्यादा नहीं मिले पर satisfaction अलग थी।
Component कहाँ से खरीदें?
- लखनऊ में: अमीनाबाद market — local दुकानें, सस्ता मिलता है
- Online: Robu.in — quality अच्छी, fast delivery
- Amazon: convenient पर थोड़ा महंगा
आखिरी मे मेरी एक सलाह:
यह project करने में मुझे करीब दो हफ्ते लगे — एक हफ्ता parts आने में, एक हफ्ता debugging में। पर जिस दिन car ने पहली बार खुद obstacle देखकर रास्ता बदला और दीवार में नहीं घुसी — वो पल सच में यादगार था।
Engineering में एक चीज़ समझ आई — theory कितनी भी पढ़ो, जब तक हाथ से नहीं बनाते, असली समझ नहीं आती। यह project वही feeling देता है।
बनाओ, तोड़ो, ठीक करो — यही असली engineering है।
विकास उर्फ अमल कुमार | B.Tech Mechanical Engineering | AKTU लखनऊ (2021–2025)
Pingback: घर पर बोलने वाला AI Robot कैसे बनाएं? (मेरा पूरा Experience 2026) – robovikas.com
Pingback: घर पर AI Robot Kaise Banaye 2026 | Step-by-Step Complete DIY Project – robovikas.com