लेखक: विकास (उर्फ़ अमल कुमार), मैकेनिकल इंजीनियर
नमस्कार दोस्तों, मेरा नाम विकास (अमल कुमार) है और मैं एक मैकेनिकल इंजीनियर हूँ। मुझे मशीनें बनाना, रोबोटिक्स प्रोजेक्ट्स पर काम करना और नए-नए DIY (Do It Yourself) प्रोजेक्ट्स बनाना बहुत पसंद है। इस लेख में मैं एक ऐसा प्रोजेक्ट शेयर कर रहा हूँ जो रोबोटिक्स सीखने वाले शुरुआती लोगों के लिए बहुत अच्छा है — DIY Robotic Arm (रोबोटिक आर्म)।
अगर आप रोबोटिक्स में शुरुआत करना चाहते हैं तो 4 से 6 Degree of Freedom (DOF) वाला Servo आधारित Robotic Arm बनाना एक बेहतरीन प्रोजेक्ट है। इस प्रोजेक्ट के माध्यम से आप मैकेनिकल डिजाइन, इलेक्ट्रॉनिक्स और प्रोग्रामिंग तीनों का बेसिक ज्ञान प्राप्त कर सकते हैं।
रोबोटिक आर्म क्या होता है?
दोस्तों , अगर बात करे Robotics Arm की तो यह मानव हाथ (Human Arm) की तरह होती है इसमें कई जॉइंट्स (Joints) और मोटर (Motors) होते हैं जो इसे अलग-अलग दिशाओं में मूवमेंट करने की क्षमता देते हैं। जैसे कि हम अपने हाथ से काम करते है।
एक साधारण रोबोटिक आर्म के मुख्य भाग होते हैं:
- Base (बेस) – पूरा रोबोटिक आर्म इसी पर खड़ा रहता है
- Shoulder Joint (शोल्डर जॉइंट) – आर्म को ऊपर-नीचे घुमाने में मदद करता है
- Elbow Joint (एल्बो जॉइंट) – आर्म को मोड़ने और फैलाने का काम करता है
- Wrist Joint (रिस्ट जॉइंट) – हाथ के एंगल को बदलता है
- Gripper (ग्रिपर) – वस्तु को पकड़ने के लिए इस्तेमाल होता है
इसी वजह से रोबोटिक आर्म का उपयोग इंडस्ट्री, मैन्युफैक्चरिंग, मेडिकल और रिसर्च में बहुत ज्यादा किया जाता है।
DOF (Degree of Freedom) क्या होता है?
Degree of Freedom (DOF) का मतलब होता है कि रोबोट कितनी दिशाओं में मूव कर सकता है।
उदाहरण के लिए:
- 4 DOF → बेस, शोल्डर, एल्बो और ग्रिपर मूवमेंट
- 5 DOF → इसमें रिस्ट का मूवमेंट भी शामिल हो जाता है
- 6 DOF → और अधिक सटीक पोजिशन और रोटेशन कंट्रोल मिलता है
शुरुआती लोगों के लिए 4 या 5 DOF रोबोटिक आर्म बनाना सबसे आसान और सही विकल्प होता है।
List of Project Component:

इस DIY रोबोटिक आर्म प्रोजेक्ट को बनाने के लिए आपको कुछ इलेक्ट्रॉनिक और मैकेनिकल पार्ट्स की जरूरत होगी।
Electronics Parts:
| Component | Price (Approx ₹) |
|---|---|
| Arduino Uno / Arduino Nano | ₹300 – ₹600 |
| Servo Motor (SG90 / MG996R) | ₹100 – ₹500 / piece |
| Servo Driver Module (PCA9685 – optional) | ₹180 – ₹300 |
| Jumper Wires | ₹80 – ₹120 |
| Breadboard | ₹50 – ₹150 |
| 5V / 6V Power Supply | ₹70 – ₹200 |
Mechanical Parts:
| Component | Price (Approx ₹) |
|---|---|
| Acrylic / 3D Printed Robotic Arm Parts | ₹300 – ₹800 |
| Robotic Gripper | ₹200 – ₹1200 |
| Nuts and Bolts Set | ₹50 – ₹100 |
| Bearings (optional) | ₹100 – ₹300 |
Tools:
| Tool | Price (Approx ₹) |
|---|---|
| Screwdriver Set | ₹100 – ₹300 |
| Soldering Iron | ₹200 – ₹500 |
| Wire Cutter | ₹100 – ₹250 |
| 3D Printer (optional) | ₹15000 – ₹30000 |
Mechanical design:
रोबोटिक आर्म का मैकेनिकल डिजाइन बहुत महत्वपूर्ण होता है क्योंकि इससे ही आर्म की मजबूती और मूवमेंट तय होती है।
एक बेसिक रोबोटिक आर्म का स्ट्रक्चर कुछ इस प्रकार होता है:
- Base Plate – पूरे आर्म को सपोर्ट देता है
- Base Servo Motor – आर्म को दाएं-बाएं घुमाने के लिए
- Shoulder Joint – आर्म को ऊपर और नीचे मूव करने के लिए
- Elbow Joint – आर्म को मोड़ने और फैलाने के लिए
- Wrist Joint – आर्म का एंगल बदलने के लिए
- Gripper – किसी वस्तु को पकड़ने के लिए
यदि आपके पास 3D प्रिंटर है तो आप इंटरनेट से Robotic Arm STL Files डाउनलोड करके अपने पार्ट्स प्रिंट कर सकते हैं।
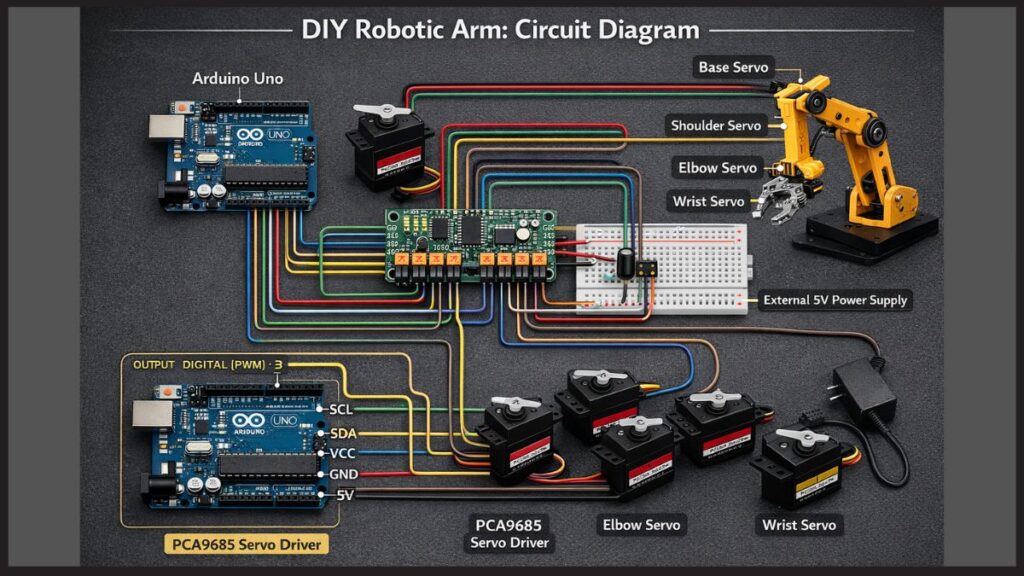
Circuit Connection:
Servo Motor को Arduino से जोड़ना बहुत आसान होता है। हर Servo Motor में तीन तार होते हैं।
- Red Wire → 5V Power
- Brown / Black Wire → GND
- Yellow / Orange Wire → Signal Pin
उदाहरण के लिए Arduino में कनेक्शन इस प्रकार हो सकते हैं:
- Base Servo → Pin 3
- Shoulder Servo → Pin 5
- Elbow Servo → Pin 6
- Wrist Servo → Pin 9
- Gripper Servo → Pin 10
ध्यान रखें कि यदि आप 4-6 Servo Motors इस्तेमाल कर रहे हैं तो External Power Supply का उपयोग करना बेहतर रहता है।
बेसिक Audino Program:
नीचे एक सरल Arduino कोड का उदाहरण दिया गया है जो रोबोटिक आर्म को बेसिक मूवमेंट करने में मदद करेगा।
#include <Servo.h>
Servo base;
Servo shoulder;
Servo elbow;
Servo gripper;
void setup() {
base.attach(3);
shoulder.attach(5);
elbow.attach(6);
gripper.attach(9);
}
void loop() {
base.write(90);
shoulder.write(60);
elbow.write(120);
gripper.write(30);
delay(2000);
}
इस कोड के माध्यम से रोबोटिक आर्म अलग-अलग एंगल पर मूव करेगा।
प्रोजेक्ट को और बेहतर कैसे बनाएं
जब आप बेसिक रोबोटिक आर्म बना लेते हैं तो आप इसे और एडवांस भी बना सकते हैं।
जैसे:
- Joystick से कंट्रोल
- Bluetooth से मोबाइल द्वारा कंट्रोल
- Camera आधारित Object Detection
- Computer Vision
- ROS (Robot Operating System) के साथ कंट्रोल
इस प्रोजेक्ट से क्या सीखने को मिलेगा
यह प्रोजेक्ट करने से आपको कई महत्वपूर्ण तकनीकी कौशल सीखने को मिलेंगे:
- Robotics की बेसिक समझ
- Servo Motor Control
- Arduino Programming
- Mechanical Linkage Design
- Mechatronics Integration
एक मैकेनिकल इंजीनियर के लिए ऐसे प्रोजेक्ट बहुत उपयोगी होते हैं क्योंकि इनमें मैकेनिक्स, इलेक्ट्रॉनिक्स और प्रोग्रामिंग तीनों का उपयोग होता है।
निष्कर्ष: Arm Robot (Robotic Arm) DIY – 4-6 DOF Beginner Project with Servos
अगर आप भी रोबोटिक्स की दुनिया में शुरुआत करना चाहते हैं तो DIY Robotic Arm Project एक शानदार शुरुआत हो सकती है। यह प्रोजेक्ट न केवल आपकी तकनीकी समझ को बढ़ाता है बल्कि आपको प्रैक्टिकल इंजीनियरिंग का अनुभव भी देता है।
मैं विकास (अमल कुमार), मैकेनिकल इंजीनियर, सभी छात्रों और टेक्नोलॉजी में रुचि रखने वाले लोगों को सलाह दूंगा कि वे ऐसे DIY रोबोटिक्स प्रोजेक्ट जरूर बनाएं। इससे सीखने के साथ-साथ इंजीनियरिंग के प्रति आपका उत्साह भी बढ़ेगा।
Happy Robotics
विकास (अमल कुमार)
मैकेनिकल इंजीनियर