लेखक: विकास उर्फ़ अमल कुमार
B.Tech Graduate (Mechanical Engineer)
नमस्कार दोस्तों , आप सभी का स्वागत है हमारे एक नए प्रोजेक्ट गाइड में इसमे हम आपको बताएंगे कि कैसे हम टेक्नॉलजी का इस्तेमाल करके एक रोबोट बना सकते है।
दोस्तों , अगर आप Arduino और Robotics सीखना शुरू कर रहे हैं, तो Obstacle Avoiding Robot एक ऐसा प्रोजेक्ट है जिससे आपको बहुत कुछ practically समझने को मिलता है। जब मैंने इंजीनियरिंग के दौरान पहली बार Arduino के साथ काम करना शुरू किया था, तब यही प्रोजेक्ट बनाया था। इस छोटे से प्रोजेक्ट ने मुझे sensors, motors और microcontroller के बीच coordination को समझने में काफी मदद की।
सरल शब्दों में कहें तो Obstacle Avoiding Robot ऐसा रोबोट होता है जो अपने सामने आने वाली रुकावट को पहचान कर खुद ही रास्ता बदल लेता है। इसके लिए हम IR Sensor का उपयोग करते हैं। IR sensor सामने मौजूद object को detect करता है और Arduino को signal भेजता है। Arduino उस signal के आधार पर मोटर को control करता है और robot को नई दिशा में घुमा देता है।
इस लेख में हम जानेंगे कि IR Sensor और Arduino की मदद से Obstacle Avoiding Robot कैसे बनाया जाता है, इसके लिए कौन-कौन से components चाहिए और यह काम कैसे करता है।
इस प्रोजेक्ट के लिए जरूरी Components कौन कौन से है?
भाई इस robot को बनाने के लिए कुछ basic electronics components की जरूरत होती है। ये सभी components आसानी से electronics market या online stores पर मिल जाते हैं।
| Component | Approx Price (₹) |
|---|---|
| Arduino Uno Rev3 | ₹400 – ₹500 |
| Infrared Proximity Sensor Module (IR Sensor) | ₹25 – ₹100 |
| L298N DC Motor Arduino Driver Board | ₹120 – ₹190 |
| DC Gear Motor (2 Motor) | ₹150 – ₹300 |
| 2WD Robot Car Chassis Kit | ₹200 – ₹300 |
| Robot Wheels (2) | ₹80 – ₹120 |
| Caster Wheel | ₹30 – ₹50 |
| Battery Pack (7V–12V) | ₹150 – ₹300 |
| Breadboard Jumper Wires Pack | ₹100 – ₹200 |
अगर आप beginner हैं तो market में robot car kit भी मिल जाती है जिसमें chassis, motors और wheels पहले से मिल जाते हैं। इससे project बनाना थोड़ा आसान हो जाता है।
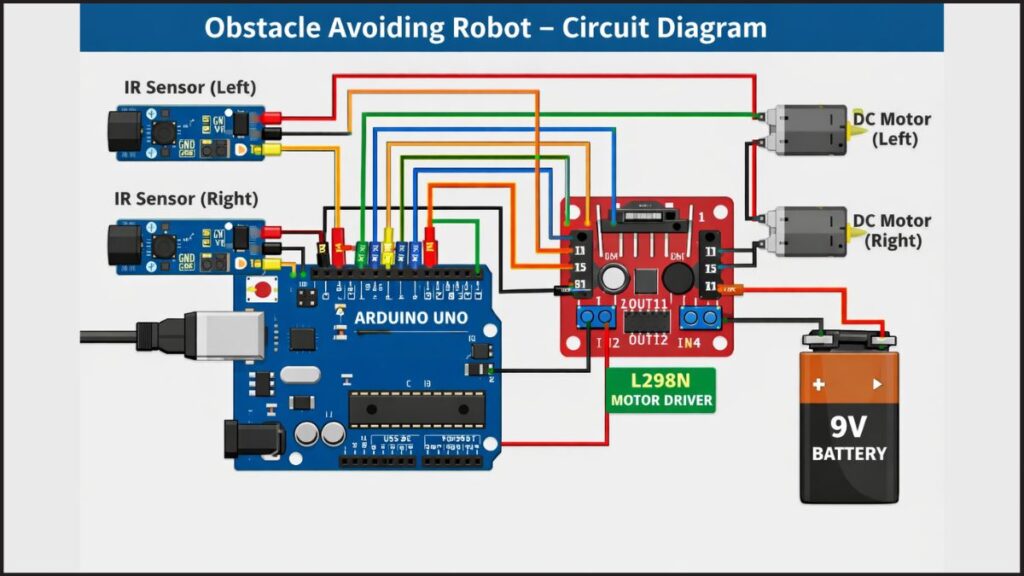
Circuit Connection कैसे करें?
इस robot का circuit बहुत ज्यादा complicated नहीं होता। इसमें मुख्य रूप से Arduino, IR sensor और motor driver के बीच connection करना होता है।
- Left IR sensor को Arduino के pin 2 से connect किया जाता है।
- Right IR sensor को Arduino के pin 3 से connect किया जाता है।
Motor driver के control pins Arduino से इस तरह जुड़े होते हैं:
- IN1 → Arduino pin 8
- IN2 → Arduino pin 9
- IN3 → Arduino pin 10
- IN4 → Arduino pin 11
Motor driver के output में दोनों DC motors connect किए जाते हैं। Power supply के लिए battery pack motor driver से connect किया जाता है।
इस setup में Arduino sensors से signal पढ़ता है और उसी के अनुसार motor driver को command देता है, जिससे motors की direction change होती है।
Arduino Code:
Circuit complete करने के बाद अगला step Arduino में code upload करना होता है। Arduino IDE में simple logic लिखा जाता है जिससे robot sensors के input के आधार पर move करता है।
#define IR_left 2
#define IR_right 3#define motor1 8
#define motor2 9
#define motor3 10
#define motor4 11void setup() {pinMode(IR_left, INPUT);
pinMode(IR_right, INPUT);pinMode(motor1, OUTPUT);
pinMode(motor2, OUTPUT);
pinMode(motor3, OUTPUT);
pinMode(motor4, OUTPUT);}void loop() {int left = digitalRead(IR_left);
int right = digitalRead(IR_right);if(left == HIGH && right == HIGH)
{
forward();
}else if(left == LOW && right == HIGH)
{
rightTurn();
}else if(left == HIGH && right == LOW)
{
leftTurn();
}else
{
stopRobot();
}}void forward()
{
digitalWrite(motor1, HIGH);
digitalWrite(motor2, LOW);
digitalWrite(motor3, HIGH);
digitalWrite(motor4, LOW);
}void leftTurn()
{
digitalWrite(motor1, LOW);
digitalWrite(motor2, HIGH);
digitalWrite(motor3, HIGH);
digitalWrite(motor4, LOW);
}void rightTurn()
{
digitalWrite(motor1, HIGH);
digitalWrite(motor2, LOW);
digitalWrite(motor3, LOW);
digitalWrite(motor4, HIGH);
}void stopRobot()
{
digitalWrite(motor1, LOW);
digitalWrite(motor2, LOW);
digitalWrite(motor3, LOW);
digitalWrite(motor4, LOW);
}
यह code sensors से signal पढ़कर robot को आगे बढ़ने, बाएँ मुड़ने, दाएँ मुड़ने या रुकने का command देता है।
Obstacle Avoiding Robot कैसे काम करता है
अब बात करते हैं कि यह robot असल में काम कैसे करता है।
- IR sensor एक प्रकार का proximity sensor होता है जो अपने सामने मौजूद object को detect कर सकता है। जब sensor के सामने कोई object आता है, तो sensor का output बदल जाता है और Arduino को signal मिलता है।
- अगर robot के सामने कोई obstacle नहीं होता तो दोनों sensors normal state में रहते हैं और robot सीधे आगे बढ़ता रहता है।
- लेकिन जैसे ही robot के सामने कोई चीज आ जाती है, sensor उसे detect कर लेता है। अगर left side sensor obstacle detect करता है तो Arduino robot को right side घुमा देता है। इसी तरह अगर right sensor obstacle detect करता है तो robot left side turn ले लेता है।
- अगर दोनों sensors एक साथ obstacle detect कर लेते हैं तो robot रुक जाता है। इस तरह robot अपने रास्ते में आने वाली रुकावटों से टकराने से बच जाता है।
आपके लिए एक जरूरी सलाह:
दोस्तों आप भी IR Sensor और Arduino का उपयोग करके Obstacle Avoiding Robot बनाना beginners के लिए एक बेहतरीन project है। इससे आपको sensors, motor driver और Arduino programming की basic understanding मिलती है।
अगर आप robotics या embedded systems में interest रखते हैं, तो ऐसे छोटे-छोटे projects से शुरुआत करना बहुत फायदेमंद होता है। धीरे-धीरे आप और advanced projects जैसे line follower robot, bluetooth controlled robot या smart automation systems भी बना सकते हैं।
लेखक के बारे में –
विकास उर्फ़ अमल कुमार
B.Tech Graduate (Mechanical Engineering)
Robotics और DIY electronics में रुचि रखते हैं और छात्रों के लिए आसान भाषा में practical projects समझाना पसंद करते हैं।
Pingback: Robotics Kya Hai? Beginner Guide Hindi – Zero Se Shuru Karo (2026) – robovikas.com